Ruoqi Zhang
Stay Huuuungry Stay Foooolish

ÅNG 103175 hus 10
Lägerhyddsvägen 1
Box 337 751 05 UPPSALA
I am a PhD Candidate supervised by Per Mattsson and co-supervised by Torbjörn Wigren at Uppsala University. Beofore my halftime, my research focuses on Reinforcement Learning (RL) and Automatic Control, particularly addressing how control could assist RL and uncertainty in RL. Now I’m more into fiffusion-based generative models in both offeline and offline-to-online RL.
I earned my master from Uppsala Univerity in 2020 and did my thesis in Uppsala System and Control Division. Beyond my research, I organize SysCon RL Reading Group, engaging weekly in recent RL papers to foster understanding and innovation within the field. Explore past discussions here.
news
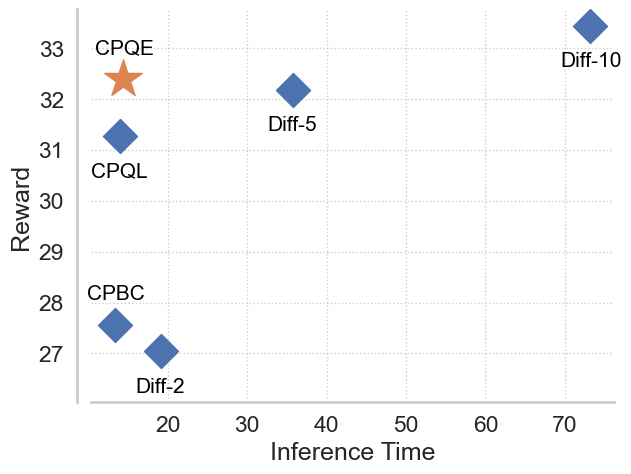
| May 16, 2025 | 🎉 Our paper Real-Time Diffusion Policies for Games: Enhancing Consistency Policies with Q-Ensembles is accepted for oral presentation at 2025 IEEE conference on Game. |
|---|---|
| Mar 15, 2025 | 🎉 We have our first milestone collabrating with EA! We utilize the consistency model as the policy for fast inference on game engine and improve the performance via q-ensembels. Check the paper via Real-Time Diffusion Policies for Games: Enhancing Consistency Policies with Q-Ensembles. |
| Oct 21, 2024 | 🎉 I will visit Professor Dominik Bauman who is leading Cyber-physical Systems Group from Oct 22nd to Dec 5th at Aalto University. This visit is partially funded by Liljewalch travel scholarships. |
| Sep 25, 2024 | 🎉 Our work Entropy-regularized Diffusion Policy with Q-Ensembles for Offline Reinforcement Learning is accepted by Neurips 2024, Vancouver. |
| Jul 24, 2024 | 🎉 Our paper Safe Output Feedback Improvement with Baselines was accpted by IEEE CDC 2024 Milano. |
selected publications
 Real-Time Diffusion Policies for Games: Enhancing Consistency Policies with Q-Ensembles2025 IEEE Conference on Games 2025
Real-Time Diffusion Policies for Games: Enhancing Consistency Policies with Q-Ensembles2025 IEEE Conference on Games 2025- Entropy-regularized Diffusion Policy with Q-Ensembles for Offline Reinforcement LearningIn Advances in Neural Information Processing Systems 2024
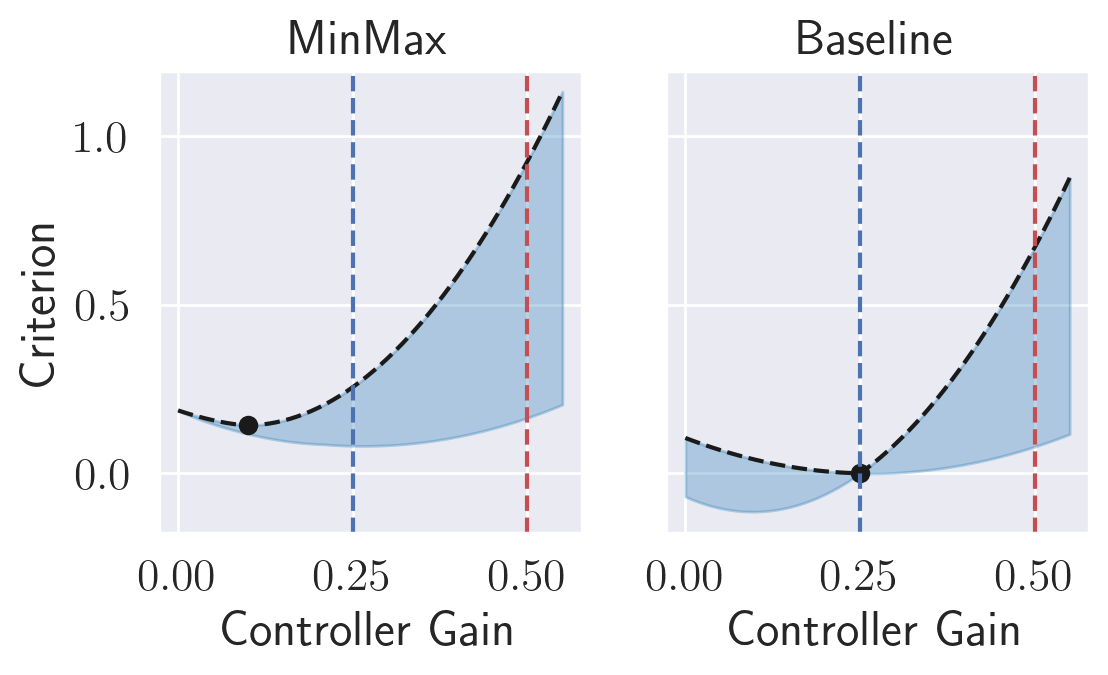 Safe Output Feedback Improvement with Baselines2024
Safe Output Feedback Improvement with Baselines2024- Aiding reinforcement learning for set point controlIFAC-PapersOnLine 2023 22nd IFAC World Congress, Yokohama, Japan
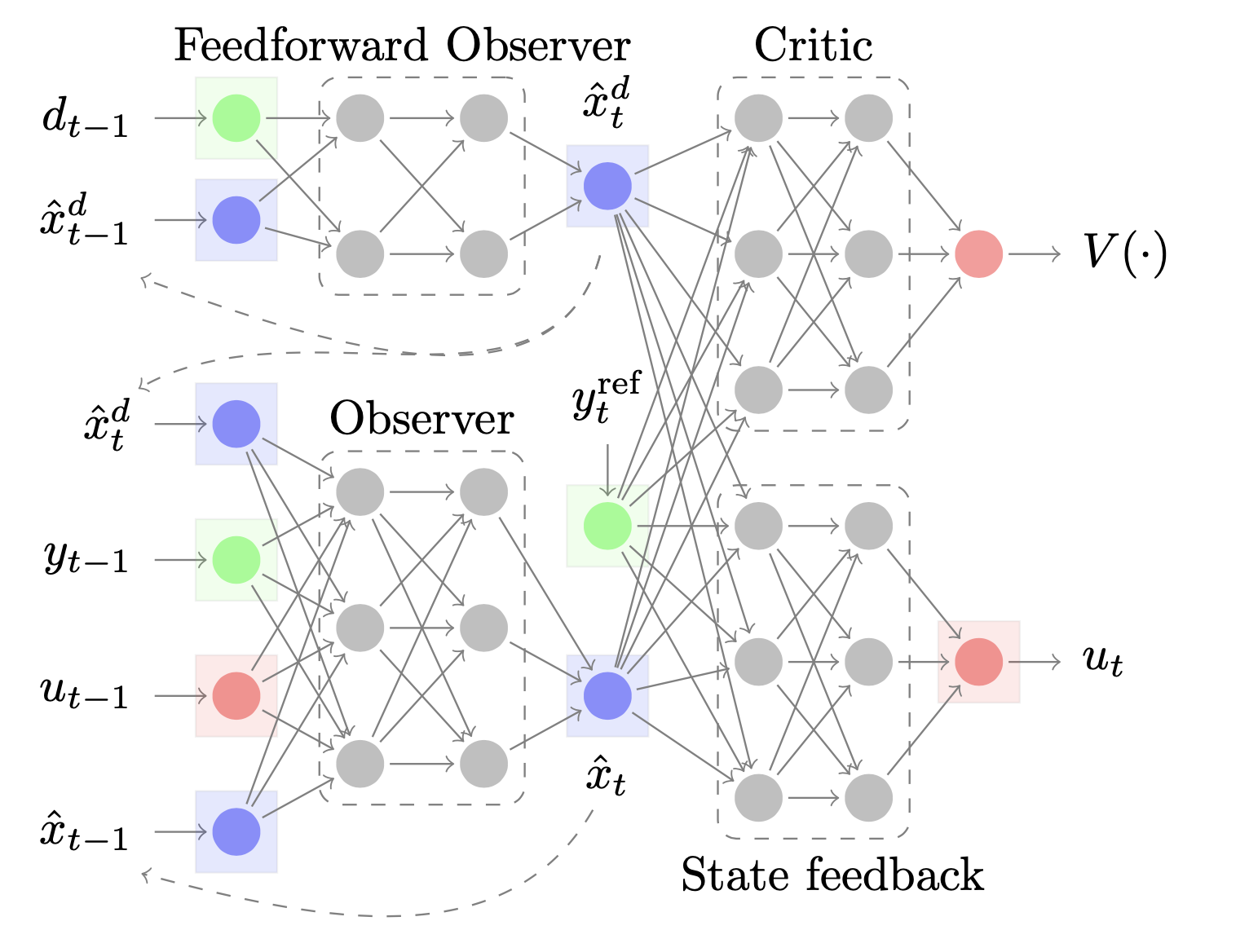 Observer-Feedback-Feedforward Controller Structures in Reinforcement LearningIFAC-PapersOnLine 2023 22nd IFAC World Congress, Yokohama, Japan
Observer-Feedback-Feedforward Controller Structures in Reinforcement LearningIFAC-PapersOnLine 2023 22nd IFAC World Congress, Yokohama, Japan- Robust nonlinear set-point control with reinforcement learningIn American Control Conference, ACC 2023, San Diego, CA, USA, May 31 - June 2, 2023 2023
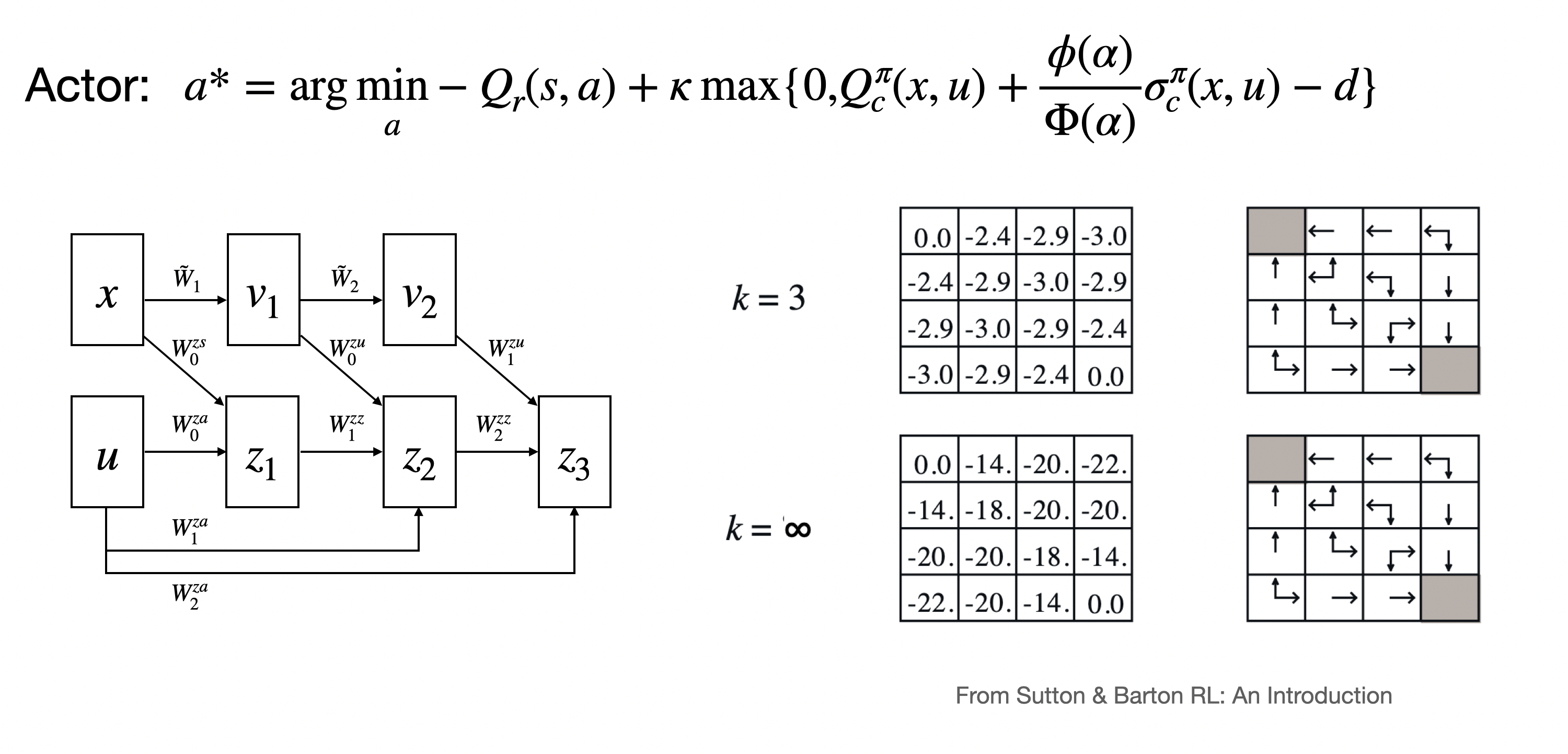 Risk-sensitive Actor-free Policy via Convex OptimisationIn Proceedings of the IJCAI-23 Joint Workshop on Artificial Intelligence Safety and Safe Reinforcement Learning , Macau, China, August 21-22, 2023 2023
Risk-sensitive Actor-free Policy via Convex OptimisationIn Proceedings of the IJCAI-23 Joint Workshop on Artificial Intelligence Safety and Safe Reinforcement Learning , Macau, China, August 21-22, 2023 2023